Meine zweite Eigenbau-Montierung heißt α leonis und basiert im Wesentlichen auf dem gleichen Prinzip, wie auch meine erste (SibMount15): Die Verwendung von Vierpunktlagern. Diesmal aber nicht nur in RA, sondern auch in DEC. Außerdem konnte ich weitere Schwachsetellen während der Nutzung der ersten Montierung ausmachen, die es zu verbessern galt.
Die wesentlichen Schwachpunkte:
- Schnecken und Räder waren von der Vixen GP (Messing und Alu) bei Modul ca 0,5
- der Durchmesser der Räder beträgt 74 mm - wäre für GOTO mit zB dem 10" Newton ein NoGo
- Grobverstellung und Klemmung in RA waren suboptimal
- die Lagerung der Deklination war suboptimal (Gleitlager), da sollte auch ein richtiges Lager rein
- die Schneckenlager waren unzureichend, speziell in Deklination
Ein Umbau der ersten Montierung kam nicht in Frage, also fing ich an, eine neue zu konstruieren. Das war im Juni 2011. Folgende Änderungen sollten umgesetzt werden:
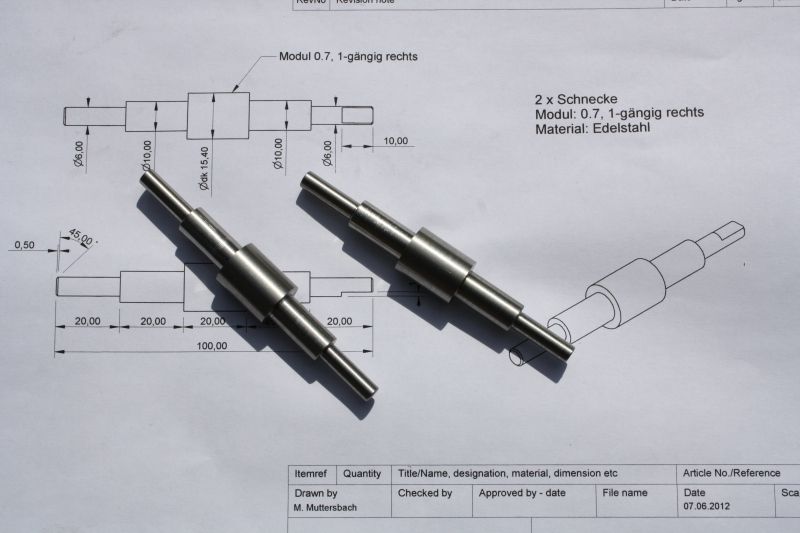
- Schneckenräder aus Bronze, Modul 0.7 bei 144 Zähnen (Durchmesser dann ca 102 mm) für beide Achsen
- passende Schnecken aus VA
- richtiges Lager in Deklination (kein Gleitlager)
- bessere Schneckenlagerungen mit Kugellagern
- bessere Grobverstellungen und Klemmungen
- Polsucher
- stativtauglich
- Monti gegebenenfalls teilbar
Da ich mit der SynScan GOTO Steuerung (für EQ5, Vixen GP etc.) recht gut klar gekommen bin, schwebte mir vor, diese samt der Motoren auch an der neuen Montierung zu verwenden. Deswegen auch die 144 Zähne der Schneckenräder.
Nach einigen Tüfteleien und Überlegungen stand dann das Design fest. Das war im Sommer 2012.
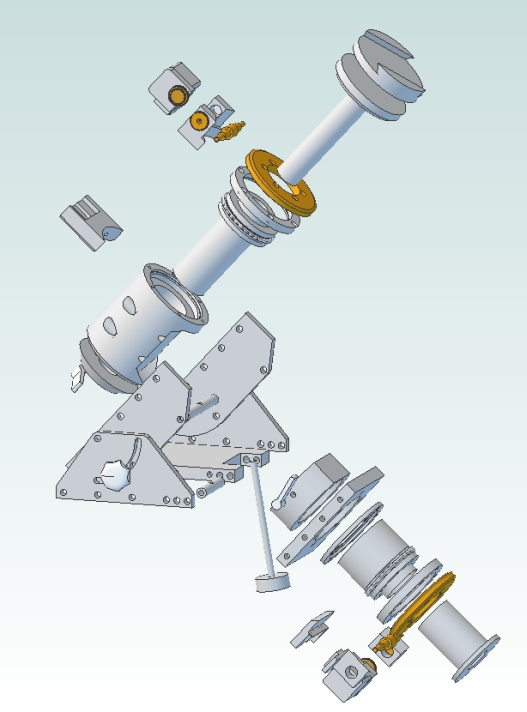
Wenn man auf das folgende linke Bild klickt, wird ein PDF geladen. Wenn man das entsprechende Acrobat Plugin installiert hat, kann man sich das Modell dann in 3D ansehen, drehen, Teile ausblenden, etc.; rechts dann eine Explosionsdarstellung:
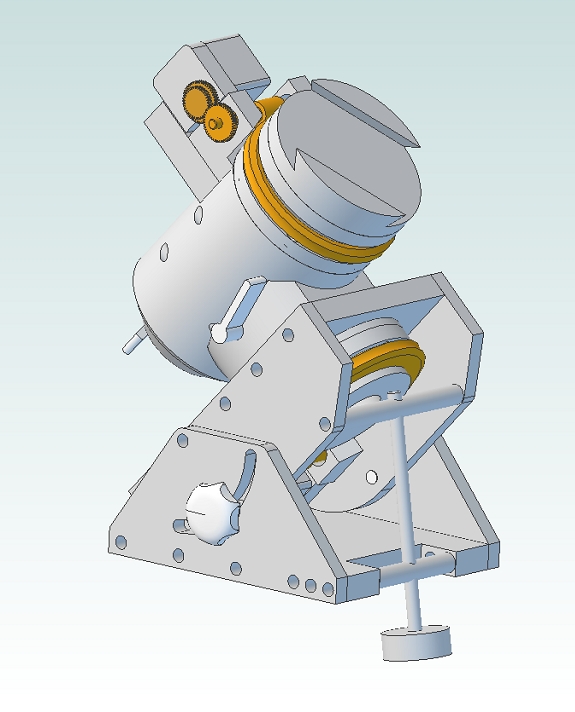
Was klar aus dem Design hervorgeht ist, dass es da wohl wieder keinen Polsucher geben wird. Also ist zumindest ein Punkt der "Wunschliste" schon mal vorerst abgehakt. Aber das nahm ich in Kauf.
Viel wichtiger war mir, die "internen Hebel" der Montierung so kurz wie möglich zu halten, die letztendlich wesentlich für die Stabilität einer Montierung verantwortlich sind; besonders wenn man nur ein Lager verwendet. Der längste Hebel, den ich in Kauf nehmen musste, war mit 85 mm die Distanz Massenschwerpunkt-Nutzlast - RA-Lager. Dafür konnte ich aber an beiden Achsen eine Distanz Schneckenrad - Lager von nur 16 mm erreichen. Auch die Höhe des Massenschwerpunkts über der Stativaufnahme ist wichtig. Diese beträgt 175 mm bei Polhöhe 48°. Zum Vergleich: Schon bei der kleinen EQ5 sind das satte 250 mm.
Zu den wichtigen Details die Lager selbst betreffend bitte die Ausführungen lesen, die ich zur ersten Montierung geschrieben habe: (SibMount15). Da hat sich nichts geändert.
Als das Design so stand ging es auch ziemlich bald los mit Teile und Material bestellen, die erste Montierung zerlegen (ich brauchte das eine Lagerelement!), und Teile fertigen. Das ging alles sehr gut und ziemlich fix. Start der Fertigung war Juli 2012.
Nachfolgend ein paar Einzelheiten und Bilder, die ich immer wieder zwischen den Arbeiten machen konnte.
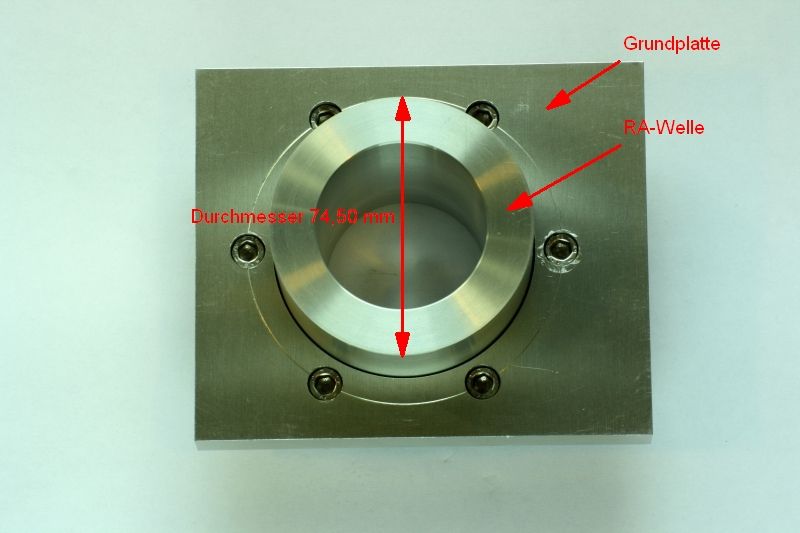
Hier ist die "Grundplatte-RA" mit Lagerschalen für die RA-Welle im Wesentlichen fertig. In der sichtbaren Nut wird später das Lager eingebaut, Ansicht von unten:

Das DEC-Gehäuse mit Lagerschale für die DEC-Welle. Auch hier ist die Nut für das spätere Lager sichtbar:

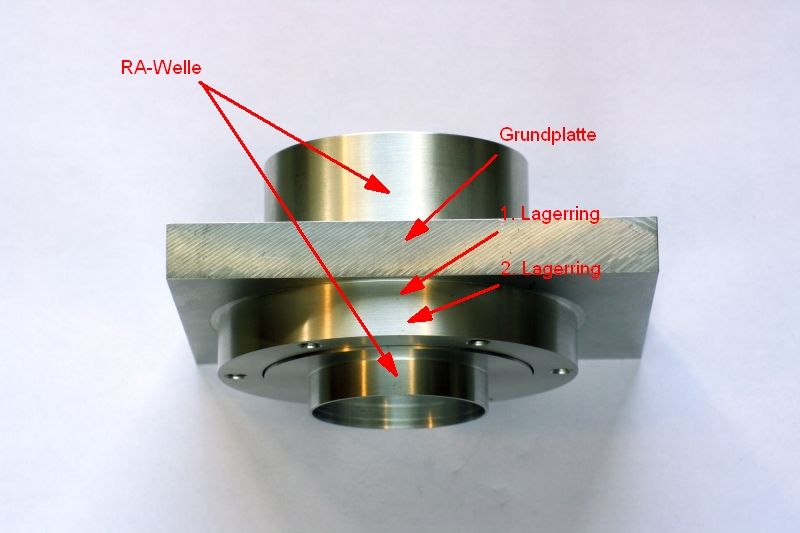
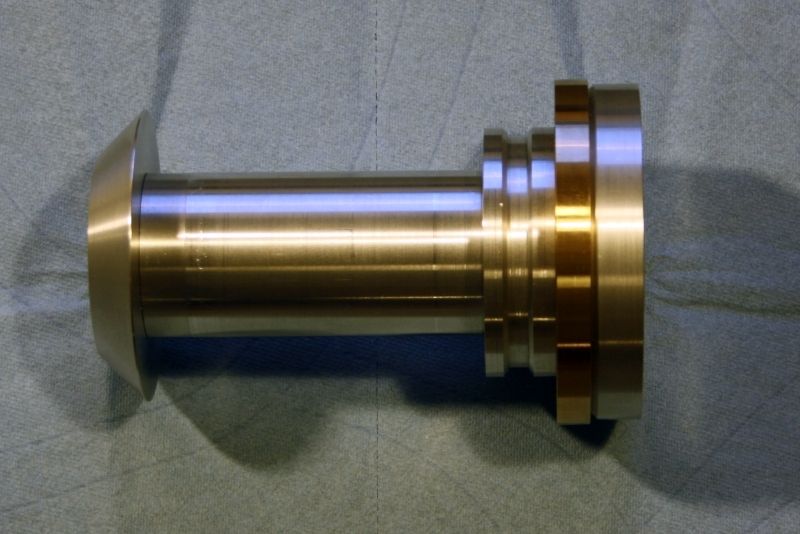
Das DEC-Gehäuse komplett mit Welle aber noch ohne Schneckenrad und ohne Anbindung an den RA-Kopf:



Das Ganze zerlegt:

Die Grundplatte-RA komplett mit RA-Welle - aber auch hier noch ohne Schneckenrad:

RA komplett mit RA-Kopf:
Auch hier das Ganze zerlegt, mit RA-Kopf (ganz links) und Welle für Grobverstellung (ganz rechts):

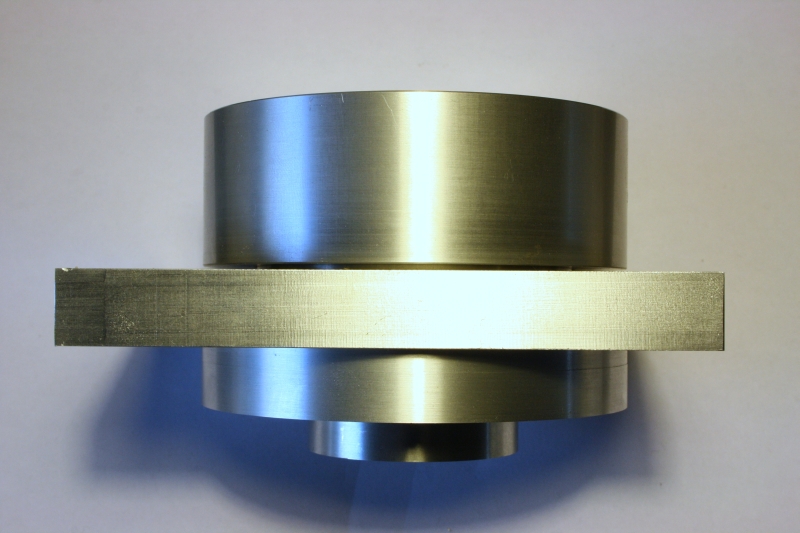
Die Rohlinge für die Schnecken sind fertig:
Im September 2012 - also nach ca 3 Monaten Bauzeit - trat eine finanzielle Zwangspause ein. Grund: Ich wollte die Schnecken und Schneckenräder in Fremdleistung von der Firma Kremp-Wetzlar verzahnen lassen, da es speziell die Schneckenräder nicht so von der Stange gibt, wie ich sie brauchte. Das kostet natürlich Geld. Dann kam auch noch ein teurer Umzug und ein neuer Job dazwischen. Also ruhten die Arbeiten.
Im Vorfeld habe ich von Kremp-Wetzlar jedoch ein Angebot eingeholt und wir hatten auch schon einige Details besprochen. Die Beratung und Mithilfe war sehr gut, sodass ich Vertrauen fasste.
Ursprünglich wollte ich die Schneckenräder und Schnecken als Einzelteile zum Verzahnen einsenden. Aber Herr Kremp riet mir davon ab und meinte, dass es doch wohl besser wäre, die Rohlinge der Schneckenräder jeweils auf der Welle montiert zu verzahnen. Das war für mich natürlich genial und für Kremp-Wetzlar scheinbar problemlos umsetzbar. Also bereitete ich alles so vor:
Die Rohlinge für die Schneckenräder sind fertig und konnten probeweise in die Wellen eingebaut werden:

So komplett montiert sollten die Schneckenräder direkt auf der Welle verzahnt werden. Es verging jedoch eine ganze Menge Zeit, bis ich endlich weiterbauen konnte - ziemlich genau 1 1/2 Jahre. Zwischenzeitlich hatte ich Bedenken, ob ich das Projekt überhaupt weiter durchziehe...
Aber endlich, Ende März 2014, konnte es weitergehen. Die Rohlinge für Schnecken und Räder wurden zu Kremp-Wetzlar zur Verzahnung geschickt, weitere Teile gefertigt und montiert. Als Herausforderung erwies sich die Aussparung, die ich in das DEC-Gehäuse für die Montage auf den RA-Kopf fräsen musste. Irgendwann habe ich mir dann doch einen Teilapparat gegönnt, dann klappte auch das - RA und DEC endlich "verheiratet":

Die Polhöhenwiege komplett mit Lagerschalen für das Lager der RA-Welle:


Hier mal ein Größenvergleich Monti - 6" F/6 Newton:

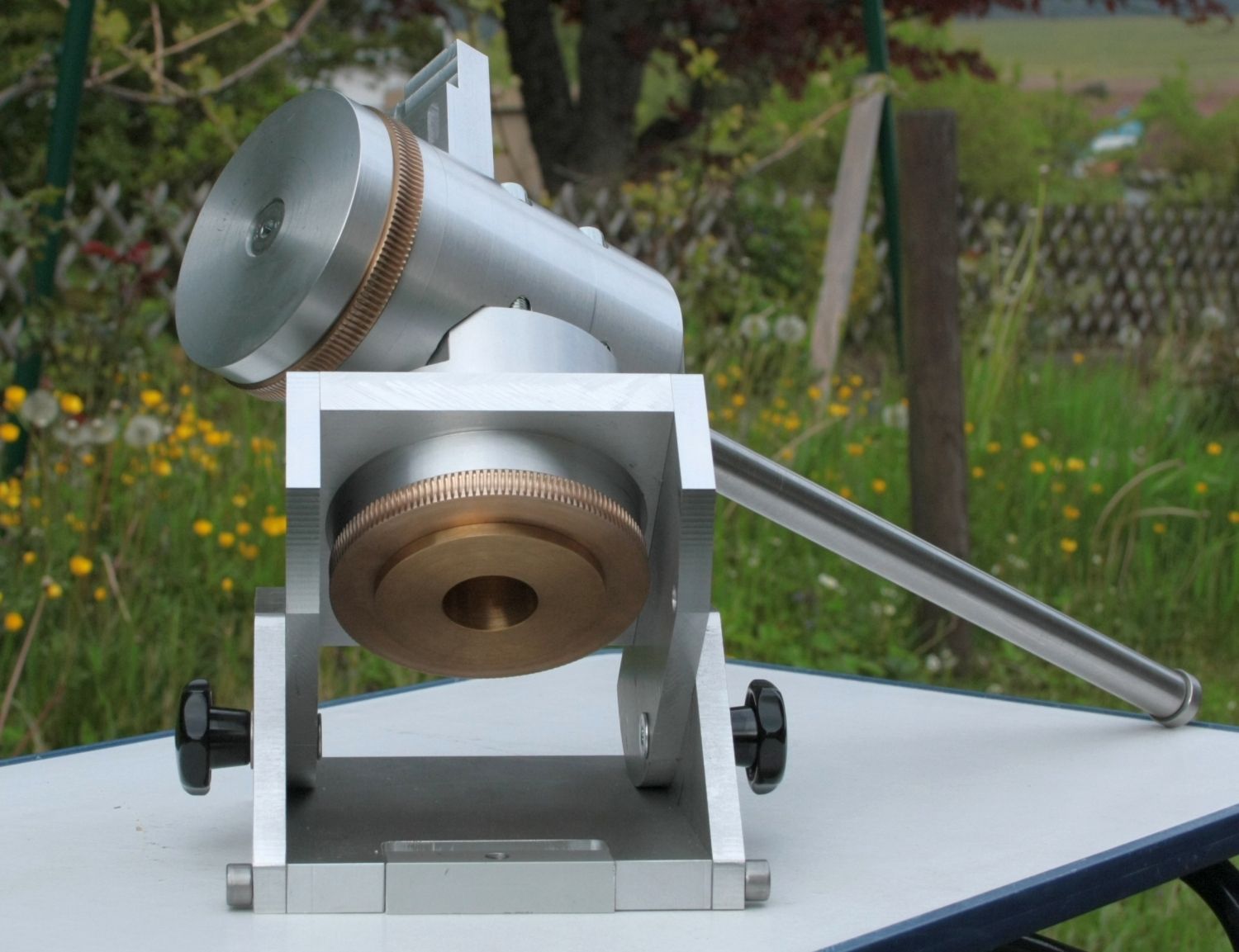
Am 15. Mai 2014 kamen die heiß ersehnten Schnecken und Schneckenräder komplett verzahnt von Firma Kremp-Wetzlar wieder bei mir an. Das war Grund genug, alles mal im zusammengebauten Zustand zu sehen:
Aber die Montierung war ja noch nicht fertig. Jetzt war noch einiges zu Tun. Die Schneckenlager und Motorenhalter mussten passgenau angefertigt und montiert werden, die Klemmungen für die Grobverstellung mussten angebracht werden. Wobei sich das alles als "einfacher" erwies, als ich zunächst befürchtete. Auf die Lagerung der Schnecken legte ich einen besonderen Wert - aus Erfahrung mit meinem ersten Selbstbau, wo das nicht so optimal war.
Hier mal ein Zwischenstand mit dem kompletten Antrieb in DEC:

Es ging weiter mit dem Antrieb in RA und weiteren "Kleinigkeiten", die bekanntlich am meisten aufhalten. Aber irgendwann war auch das geschafft.
Am 23. Mai 2014 war es dann endlich soweit: Die α leonis steht auf der Säule auf der Terrasse und trägt den 10" Newton, der wiegt ca 13 kg:


Dann habe ich einfach mal das GOTO aktiviert, also ein "First Run" am Tage durchgeführt. Dazu gibt es ein Filmchen (ca 16 MB!):

Ich habe auch das Schwingungsverhalten mit dem Newton überprüfen können. Fazit: Schwingungen?, was ist das? ;-).
Natürlich habe ich die Montierung so nicht der Witterung ausgesetzt. Alle mechanischen Teile wurden ordentlich gefettet, die Schnecken-Getriebe mit Verkleidungen geschützt usw. Seit dem steht die Montierung auf der Terrasse und wartet auf den ersten, ehrlichen Einsatz. Es ist aber so, wie es oft ist: Der erste Einsatz lässt auf sich warten. Das Wetter ist unausstehlich diesen Sommer (2014) und ich konnte bis jetzt nur die Nachführung einigermaßen testen. Diese kann sich allerdings echt sehen lassen. Es folgt eine Kurve, aufgenommen mit PHD1 und Sucher-Guiding (F ca 235mm) mit ALCCD5:
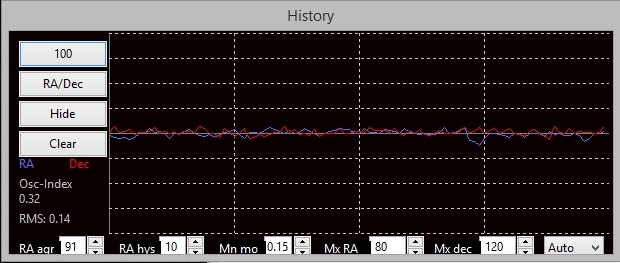
Das sieht richtig gut aus!, und lässt durch evtl angepasste Einstellungen in PHD auf einiges hoffen. Hier gibt es dann ein Update, wenn ich mit der neuen Montierung endlich mal was sinnvolles machen konnte.
Die reine Bauzeit für die Montierung, also ohne Zwangspause, betrug ca 4 1/2 Monate. Die komplette Dauer von der ersten Planung bis zur Fertigstellung der Montierung betrug fast 3 Jahre. Die Montierung besteht aus 36 einzelnen Komponenten, die alle gefertigt wurden. Insgesamt sind an der Montierung ~50 Teile verbaut (ohne Schrauben! - es sind ca 60...).
Die Schneckengetriebe machen einen ausgezeichneten Eindruck, die Verzahnung würde ich jeder Zeit wieder durch Kremp-Wetzlar durchführen lassen. Auch wenn es "etwas" teurer ist.
Die Kosten für die Fertigung belief sich auf ca 1100,- Euro - rein nur Material, Kleinteile, Fremdleistung. Nicht eingerechnet sind Kosten für angeschaffte Werkzeuge (die ich sowieso immer wieder benötige), Steuerung, Motoren, Gegengewichte und Prismenklemme. Das hatte ich alles schon.
Zusammenfassend nun einige Technische Daten der Montierung |
|
Benutzte Materialien |
|
Lagerung RA und DEC |
|
Schneckengetriebe |
|
Steuerung |
|
Maße |
|
Gewicht |
|
Tragkraft (nur Teleskop) |
|
Noch ein Hinweis in eigener Sache:
Der nicht kommerzielle Nachbau ist jedem freigestellt. Urheberrechte behalte ich mir jedoch vor. Ich bin gerne bereit Hilfestellungen zu leisten, wenn es um das eigene, private Projekt geht.
Wer mehr zu verschiedenen Details wissen möchte kann mich gerne anschreiben: Email
Einen Dikussions-Thread zu dieser Montierung gibt es auf www.balkonsternwarten-netzwerk.de: Vielleicht bau ich eine neue Monti. Dort ist der komplette Werdegang der Montierung mit weiteren Details, Zeichnungen, etc. dokumentiert.
Thomas Möller hat eine Azimutale Montierung für einen Doppelrefraktor gebaut und hat darüber im Astrotreff berichtet. Auch hier wurden Vierpunktlager verwendet: Beschreibung der Montierung und der ganze Thread zum Doppelrefraktor.
Einen klaren Himmel wünscht
Matthias